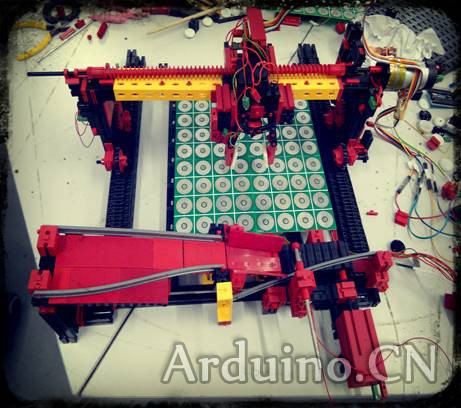
人工智能之五子棋机器人——人机对弈
#1 人工智能之五子棋机器人——人机对弈 作者:有志青年 发表时间:2013-2-20 15:18:18
[此帖子已被 有志青年 在 2013-2-20 15:38:45 编辑过]
#2 Re:人工智能之五子棋机器人——人机对弈 作者:有志青年 发表时间:2013-2-20 15:33:30

[此帖子已被 有志青年 在 2013-2-20 15:39:32 编辑过]
#3 Re:人工智能之五子棋机器人——人机对弈 作者:有志青年 发表时间:2013-2-20 15:35:11

#4 Re:人工智能之五子棋机器人——人机对弈 作者:有志青年 发表时间:2013-2-20 15:36:24


#5 Re:人工智能之五子棋机器人——人机对弈 作者:有志青年 发表时间:2013-2-20 15:37:55

以上是根据比赛答辩的PPT重新撰写的。
#6 Re:人工智能之五子棋机器人——人机对弈 作者:掌棋宣传员 发表时间:2013-2-20 16:04:26
不知道棋力如何?